مبدل سرعت خطی (Linear Velocity Transducer) و مبدل سرعت زاویه ای یا چرخشی (Angular Velocity Transducer)از انواع مبدل های حرکت هستند، این دو مبدل سرعت خطی و زاویه ای شی را اندازه گیری و سپس آن را به سیگنال الکتریکی قابل اندازه گیری تبدیل میکنند. در این مقاله سعی کردیم تعریفی از مبدل های سرعت خطی و زاویه ای و فرمول سرعت خطی و فرمول سرعت زاویه ای ارائه نماییم.
مبدل حرکت (Motion Transducer) نوعی مبدل یا ترانسدیوسر است که حرکت مکانیکی را به سیگنال الکتریکی تبدیل میکند، مبدل های حرکت در اتوماسیون صنعتی، حمل و نقل، پزشکی و غیره کاربرد گستردهای دارند. مبدل های حرکت شامل 2 بخش مهم است:
- مبدل سرعت
- مبدل شتاب یا سنسور شتاب سنج
در این مقاله قصد داریم تا درباره مبدل های سرعت (Velocity Transducers) یعنی قسمت اول مبدل های حرکت صحبت کنیم.
مبدل سرعت چیست؟
یک مبدل سرعت، دستگاهی است که سرعت حرکت یک جسم را اندازهگیری و آن را به یک سیگنال الکتریکی قابل اندازهگیری تبدیل میکند. این سیگنال الکتریکی نشاندهندهی سرعت حرکت یک شیء در حال حرکت است.
دو نوع اصلی مبدل های سرعت (Velocity Transducers) وجود دارد:
- مبدل سرعت خطی
- مبدل سرعت زاویه ای
مبدل سرعت خطی
مبدل سرعت خطی دستگاهی است که که حركت در راستای یك محور (خطی) را اندازهگیری میکند. فرمول سرعت خطی به شرح زیر است که v عبارت است از نرخ تغییرات وضعیت x که واحد آن اینچ بر ثانیه، متر بر ثانیه، مایل بر ساعت و یا كیلومتر بر ساعت خواهد بود.

سرعت خطی را می توان با چندین روش مختلف اندازه گیری نمود. انواع روش های محاسبه سرعت خطی به شرح زیر میباشد:
- الکترومغناطیسی
- انتگرال گیر از شتاب سنج
- رادار داپلر یا سیستم های لیزری
الکترومغناطیسی
روش الکترومغناطیسی زمانی کاربرد دارد که كل تغییر مكان در یك محدوده خاص صورت گیرد. هسته مبدل الكترومغناطیسی سرعت خطی، یك مغناطیس دائم بوده و ولتاژ القایی در سیم پیچ، به سرعت حركت هسته بستگی دارد. با تغییر جهت حركت، پلاریته ولتاژ القایی نیز تغییر خواهد كرد. البته، در این ساختار، هسته مغناطیسی نباید از سیم پیچ خارج شود. بنابراین طول سیم پیچ، محدود كننده طول مسیر حركت قابل اندازه گیری می باشد.

شکل (1). مبدل سرعت خطی الکترومغناطیسی از نوع “كویل و بوبین“Coil & Bobbin Type Velocity Pickup
انتگرال گیر از شتاب سنج
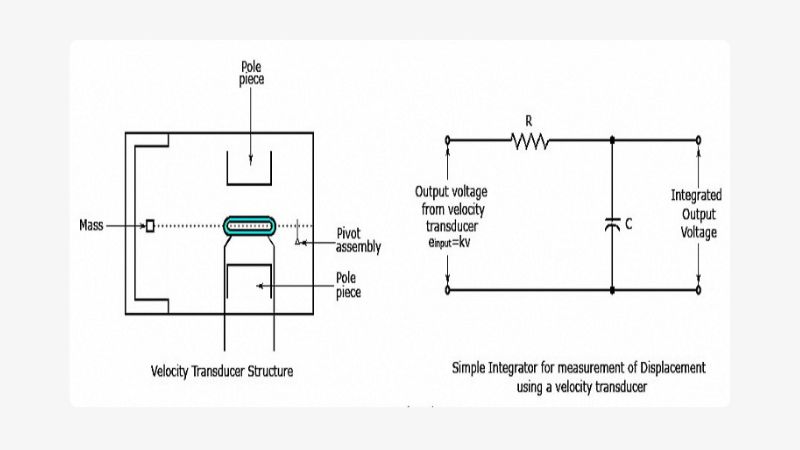
حركت بسیار طولانی است… یک مبدل سرعت از نوع انتگرال گیر شتاب، محدودیت کمتری دارد. این نوع مبدل سرعت که به مبدل سرعت پیزوالكتریك معروف است، در اصل مبدل شتابی است كه با استفاده از انتگرال گیری از سرعت، كار می كند. ولتاژ خروجی آن از یك مبدل شتاب پیزوالكتریك به دست می آید:

با انتگرال گیری از شتاب و اضافه نمودن سرعت اولیه (V0)، می توان در هر لحظه، سرعت را محاسبه نمود. البته امکان انجام این محاسبات با استفاده از مدارات الكترونیكی نصب شده درون مبدل نیز وجود دارد.

شکل (2). شکل و مدارات الکتریکی یک مبدل سرعت پیزوالكتریك
رادار داپلر یا سیستم های لیزری
هیچ اتصالی به قطعه متحرك، مجاز نیست… گاهی اوقات نمی توان مبدل سرعت را به جسم متحركی كه باید سرعت آن اندازه گیری شود، نصب نمود. زیرا ممکن است جرم مبدل، موجب کاهش سرعت جسم متحرك گردد یا شاید جسم متحرك هدفی است كه باید ردیابی شود و در دسترس نیست. در این صورت می توان از رادار داپلر یا لیزر استفاده نمود.
اثر داپلر بر اساس شیفت فركانسی است كه متناسب است با سرعت نسبی. این موضوع را همگان تجربه كرده اند که وقتی كنار جاده ایستاده اند و اتومبیلی نزدیك می شود، صدای آن دارای فركانس بیش تری نسبت به زمانی که دور می شود.، شنیده می شود. فركانس رسیده نسبت به نظاره گر ثابت برابر است با:
![]()
به صورتی که f0 فركانس پخش شده و fv تابع خطی از سرعت است. اگر جسم متحرك نزدیك شود این فركانس مثبت است و اگر جسم متحرك دور شود این فركانس منفی است.
در رادار داپلر یا لیزر، یك موج پیوسته یا یك سری پالس به سمت جسم متحرك كه سرعت آن مورد نظر است، فرستاده می شود. فركانس موج فرستاده شده پس از برخورد به هدف و بازگشت تغییر می كند. به صورتی که این تغییر بر اساس سرعت نسبی اتفاق می افتد. سیگنال برگشتی پس از دریافت زمان و فركانس آن با سیگنال ارسالی مقایسه می گردد. طول زمان سیگنال ارسالی تا هدف و برگشت آن و اختلاف فركانس سیگنال برگشتی در مقایسه با فركانس سیگنال فرستاده شده fv نشان گر سرعت هدف می باشد.
برای مثال، می توان از رادارهای داپلری كه به طور معمول، پلیس برای تشخیص سرعت خودروها استفاده می کند، نام برد. همین روش برای هدف گیری موشك و ردیابی هواپیماها نیز کاربرد دارد.
تمامی این مبدل ها بر اساس این اصل كه ولتاژ القایی ایجاد شده توسط میدان مغناطیسی در یك سیم پیچ، به صورت مستقیم با نرخ تغییرات میدان مغناطیسی متناسب است، عمل می كنند:


مبدل سرعت زاویه ای
مبدل سرعت زاویه ای حركت حول یك محور (زاویه ای) را اندازه گیری میکند. مبدل سرعت زاویه ای سرعت دورانی یك نقطه مورد نظر حول یك مركز را به سیگنال الکتریکی قابل اندازه گیری تبدیل می کند. سرعت زاویه ای بر حسب رادیان بر ثانیه، درجه بر ثانیه، یا دور بر دقیقه بیان می گردد.
فرمول سرعت زاویه ای
مبدل های سرعت زاویه ای به صورت معمول به دو دسته تقسیم می شوند:
- ولتاژ خروجی معرف سرعت زاویه ای
- فركانس خروجی معرف سرعت زاویه ای
سرعت زاویه ای – ولتاژ خروجی
متداول ترین مبدل سرعت زاویه ای، تاكومترهای الكترومغناطیسی DC هستند. میدان توسط مغناطیس دائم و یا با تحریك سیم پیچ مجزا بر روی استاتور فراهم می گردد.
روتور از سیم پیچ های سری ساخته شده است. با چرخش روتور، ولتاژ از طریق میدان مغناطیسی درون سیم پیچ القاء می گردد. دامنه EMF القایی در سیم پیچ به صورت مستقیم متناسب با سرعت چرخش روتور می باشد. با اتصال چندین سیم پیچ به صورت سری و دوران آن ها از طریق چندین میدان، یك ولتاژ خروجی به نسبت بزرگ و بدون ریپل به دست می آید.
این سیگنال توسط كموتاتور و جاروبك ها از روتور به بیرون مرتبط می گردد. یك تغییر جهت در دور باعث تغییر پلاریته ولتاژ خروجی می گردد. دلایل گوناگونی برای رایج بودن استفاده از تاكومترها وجود دارد:
- استفاده بسیار ساده
- ولتاژ خروجی به نسبت بزرگ و مستقیم و عدم نیاز بیش از حد به بهبود كیفیت سیگنال
- ولتاژ خروجی با مغناطیس دائم، به طور معمول، 3 تا 7 ولت به ازاء هر 1000 دور در دقیقه ، ولتاژ خروجی با تحریك سیم پیچ الكترومغناطیس در استاتور ، 10 تا 20 ولت در هر 1000 دور در دقیقه.
- دقت 0.1 % الی 0.25 % FSO
اما نقطه ضعف تاكومتر، كموتاتور و جاروبك های آن می باشد. هر جرقه در جاروبك ها موجب تداخل فركانس رادیویی RFI شده كه سایر سیستم های كنترلی باید از آن محفوظ باشند. در كاربردهایی كه استفاده از جاروبك ها، موجب اختلال می شود؛ استفاده از تاكومترهای AC القایی پیشنهاد می شود. در ساختار این نوع تاكومترها كه به آن ها “تاكومتر مغناطیس دائم” نیز گفته می شود؛ هیچ گونه جاروبكی به کار نرفته است. در این نوع تاكومترها سیم پیچ های اولیه و ثانویه با زاویه 90 درجه بر روی استاتور قرار دارند. روتور آن ها از نوع “قفس سنجابی” بوده و از فلز آهن با ضریب هدایت بالا ساخته می شود.
زمانی که یك سیگنال 50 هرتز به سیم پیچ اولیه متصل می شود، یك “جریان ادی” (Eddy Current) با زاویه 90 درجه به سیم پیچ در روتور القاء می گردد. وقتی كه روتور ثابت و بدون حركت است، میدان مغناطیسی تولید شده توسط جریان ادی در روتور با زاویه 90 درجه نسبت به سیم پیچ ثانویه می باشد، سیم پیچ ثانویه قطع نشده و ولتاژی در آن ایجاد نمی شود.
اما زمانی كه روتور می چرخد، این میدان در اطراف سیم پیچ ثانویه می چرخد و باعث القاء ولتاژ خروجی می گردد. هر چه سرعت چرخش و دوران بیش تر باشد میدان القایی روتور ثانویه را قطع نموده و ولتاژ القایی بزرگ تری را در سیم پیچ ثانویه القاء می كند. ولتاژ خروجی از نوع AC می باشد و برای استفاده باید یک جهته و فیلتر شود. از آن جا که سیم پیچ های اولیه و ثانویه در زاویه 90 درجه نسبت به یكدیگر قرار دارند، خروجی، 90 درجه نسبت به تحریك ورودی اختلاف فاز دارد.
وقتی محور در جهت خاصی می چرخد، خروجی نسبت به ورودی پیش فاز و اگر در جهت مخالف بچرخد خروجی 180 درجه تغییر فاز می دهد و در نهایت 90 درجه نسبت به ورودی تاخیر فاز خواهد داشت. پس برای تعیین جهت باید اختلاف فاز بین ورودی و خروجی آشكار گردد. گرچه در این نوع تاكومتر، مشكلات مربوط به جاروبك ها وجود ندارد ولی باید در آن از مدارات یك سو كننده، فیلتر و تشخیص فاز استفاده کرد.
اگر چرخش پیوسته نداشته باشیم و یا كل سیستم به همراه مدارات الكترونیك، نمایشگر و سنسور بچرخد (مثل هواپیما) سنسور نرخ تغییر زاویه واتسون انتخاب خوبی خواهد بود. شكل زیر این نوع سنسور را نشان می دهد.

شکل (3). سنسور نرخ تغییرات زاویه واتسون
مبدل های سرعت زاویه ای كه تاكنون مورد بحث قرار گرفته است، خروجی ولتاژ داشته اند.
سرعت زاویه ای – فرکانس
دسته ای دیگر از انواع تاكومترها وجود دارند كه فركانس خروجی آن ها متناسب با سرعت است (دامنه آن ها نیز ممكن است تغییر یابد).تاكومتر مغناطیس دائم AC، از یك روتور با چندین قطب مغناطیس دائم استفاده می کند. یك سیم پیچ که روی استاتور قرار دارد، توسط مغناطیس های روتور قطع می شود. به این ترتیب، زمانی كه قطب شمال روتور از مقابل سیم پیچ می گذرد، یك پالس با یك پلاریته مشخص تولید می شود.
در حالی كه پلاریته مخالف آن وقتی ایجاد می گردد كه قطب جنوب از مقابل سیم پیچ می گذرد. دامنه و زمان صعود پالس های ایجاد شده متناسب با سرعت تغییر می كند كه پردازش سیگنال باید بر روی آن ها صورت بگیرد تا بر استانداردهای TTL یا CMOS منطبق گردد.
نوع دیگر تاكومتر، مطابق نمونه ذکر شده با استفاده از “اثر هال“ (Hall Effect) کار می کند که در آن به جای سیم پیچ از سنسور اثر هال استفاده می شود. خروجی این نوع تاكومتر باید با استفاده از مقاومت “پول آپ” به ولتاژ 5+ ولت وصل شود تا بتوان پالس های تولید شده را محاسبه کرد.
در تاكومتر با روتور دندانه ای، یك مغناطیس دائم در استاتور قرار می گیرد. روتور به شكل چرخ دنده و از جنس فلز با رلوكتانس (Reluctance) كم ساخته می شود. زمانی که دندانه ها می چرخند و از مقابل سنسور مغناطیسی می گذرند، كوپل بین مغناطیس و سنسور بیش تر شده و باعث قطع میدان مغناطیسی می گردد و پالسی به ازاء هر دندانه ایجاد می شود.
انکودر افزایشی نوری كه در بخش گذشته مورد بحث قرار گرفتند؛ نیز می توانند به عنوان مبدل سرعت مورد استفاده قرار بگیرند که در آن ها فركانس پالس های ایجاد شده معرف سرعت زاویه ای محور چرخان خواهد بود.
در اغلب مبدل های سرعت دورانی و چرخشی كه تا به حال مورد بررسی قرار گرفته است باید محور به مبدل وصل شود، این نکته در بسیاری از مواقع، اختلالات مكانیكی ایجاد می كند. البته گاهی اوقات نیز ممکن است، امكان اتصال مبدل سرعت به محور وجود نداشته باشد.
وزن مبدل نیز گاهی ممكن است موجب بروز اختلالاتی در سیستم “سرومكانیسم” گردد. این نوع اختلالات را می توان با استفاده از سیستم انعكاس نور حل نمود. در این روش، یك نوار باریك منعكس كننده نور به محور متصل می كنند و با استفاده از یك منبع مادون قرمز و آشكار كننده آن، می توان سرعت محور چرخان را اندازه گیری نمود.

شکل (4) مبدل سرعت زاویه ای – نوری افزایشی
تبدیل سرعت خطی به سرعت زاویه ای
در فیزیک، سرعت خطی و سرعت زاویهای دو مفهوم مرتبط هستند که برای توصیف حرکت جسم استفاده میشوند. سرعت خطی به میزان جابجایی جسم در واحد زمان اشاره دارد، در حالی که سرعت زاویهای به میزان تغییر زاویه جسم در واحد زمان اشاره دارد.
برای تبدیل سرعت خطی (v) به سرعت زاویهای (ω)، باید به شعاع دایره یا مسیر حرکت جسم (r) توجه کنیم. رابطه بین این سه کمیت به صورت زیر است:
ω = v / r
در این رابطه:
- ω سرعت زاویهای بر حسب رادیان بر ثانیه (rad/s) است.
- v سرعت خطی بر حسب متر بر ثانیه (m/s) است.
- r شعاع دایره یا مسیر حرکت بر حسب متر (m) است.
این رابطه نشان میدهد که سرعت زاویهای جسم با سرعت خطی آن نسبت مستقیم و با شعاع دایره یا مسیر حرکت آن نسبت معکوس دارد. به عبارت دیگر، هرچه سرعت خطی جسم بیشتر باشد، سرعت زاویهای آن نیز بیشتر خواهد بود، و هرچه شعاع دایره یا مسیر حرکت جسم بیشتر باشد، سرعت زاویهای آن کمتر خواهد بود.
تبدیل سرعت زاویه ای به سرعت خطی
فرمول سرعت دورانی
تبدیل سرعت دورانی به خطی
تبدیل سرعت خطی به دورانی
تا جای ممکن که مربوط به این مقاله است از تایتل فرمول های سرچ کنسول استفاده شود
سخن پایانی
در این مقاله مبدل حرکت و انواع آن را توضیح دادیم سپس مبدل سرعت را تعریف کرده و دو نوع مبدل سرعت به نام های مبدل سرعت خطی و مبدل سرعت زاویه ای را به همراه فرمول سرعت خطی و فرمول سرعت زاویه ای بیان کردیم. همچنین انواع مبدل سرعت خطی را بر اساس نحوه اندازه گیری سرعت خطی اجسام شرح دادیم. لازم به ذکر است که این مقاله بخشی از کتاب Industrial Control Electronics نوشته مایکل جاکوب است با مراجعه به بخش اصول و مبانی ابزار دقیق در مقالات سایت می توانید مقالات بیشتری را با محوریت این کتاب مطالعه نمایید.

3 پاسخ
سلام، امکانش هست کاربرد سرعت زاویه ای در رباتیک رو توضیح بدید؟
سلام روز بخیر
چگونه سرعت خطی به سرعت زاویهای تبدیل میشود؟
سلام، تبدیل سرعت خطی به سرعت زاویه ای در متن مقاله جهت مطالعه اضافه شده است.