به پاسخ و رفتار مبدل به تغییرات ورودی ویژگی های دینامیکی مبدل یا ترانسدیوسر نامیده میشود به عبارتی دیگر هنگام استفاده از مبدل ها، هدف این است كه تغییرات در ورودی حس شده و به سیستم كنترل كننده اعلام گردد. ویژگی دینامیكی مبدل ها را می توان با استفاده از ورودی پله و یا سینوسی محاسبه کرد به ندرت اتفاق میافتد كه مبدلی در حالت ایستا مورد استفاده قرار بگیرد. تمامی ویژگی هایی كه در بخش های قبل مورد بررسی قرار گرفت، ویژگیهای استاتیكی مبدل ها بودند و برای به دست آوردن آن میبایستی اطلاعات خروجی مبدل ها بعد از عبور از حالت گذرا و رسیدن مرحله پایداری كامل، محاسبه شود. در غیر این صورت اطلاعات به دست آمده غلط و نتایج ویژگی های استاتیكی، کاربردی نخواهند بود.
در صورتی که میخواهید بدانید ترانسدیوسر چیست، با کاربرد و انواع آن بیشتر آشنا شوید اینجا را کلیک کنید.
تعیین ویژگی های دینامیکی مبدل با استفاده از ورودی پله
با استفاده از ورودی پله و بررسی پاسخ مبدل ویژگی های زیر به دست میآیند.
- سرعت پاسخ مبدل به تغییرات كمی (Rise Time)
- ثابت زمانی (Time Constant)
- زمان مرده (Dead Time)
- ضریب میرایی (Damping Coefficient)
- فركانس رزونانس (Resonant Frequency)
- زمان نشست (Settling Time)
- درصد بالازدگی (Overshoot Percentage)
حال به بررسی و تاثیر هر یک از موارد بالا می پردازیم:
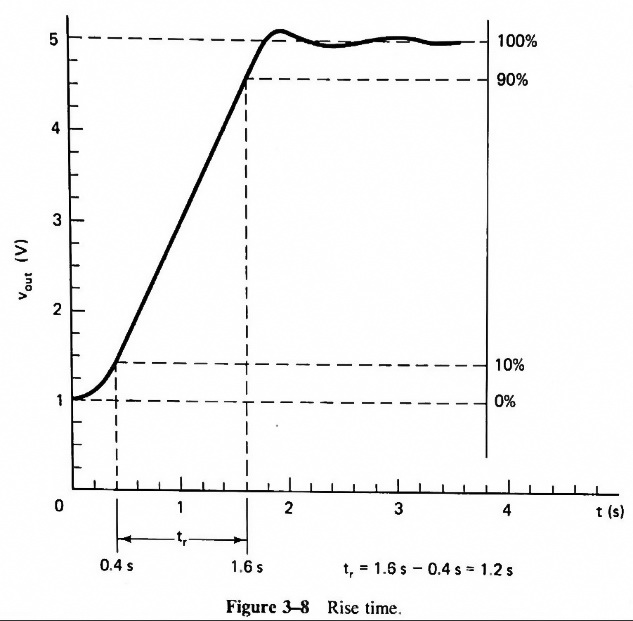
1. سرعت پاسخ مبدل به تغییرات كمی (Rise Time)
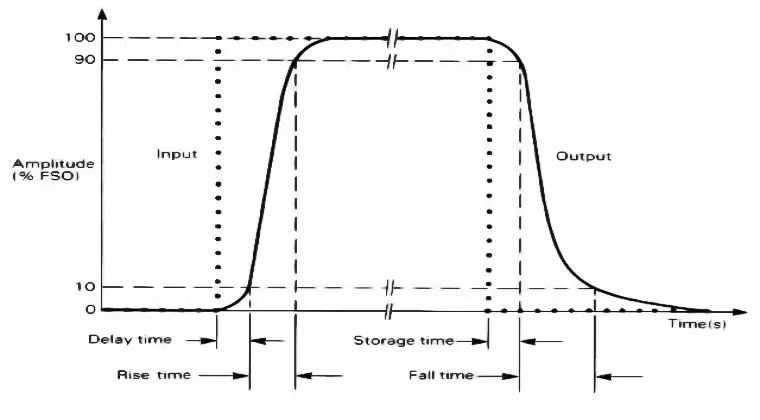
سرعت پاسخ مبدل، مدت زمانی است كه خروجی آن از 10% به 90% مقدار نهایی برسد.
خدمات نیکسا: مشاوره، نصب و راه اندازی تجهیزات ابزار دقیق و اتوماسیون صنعتی نیکسا
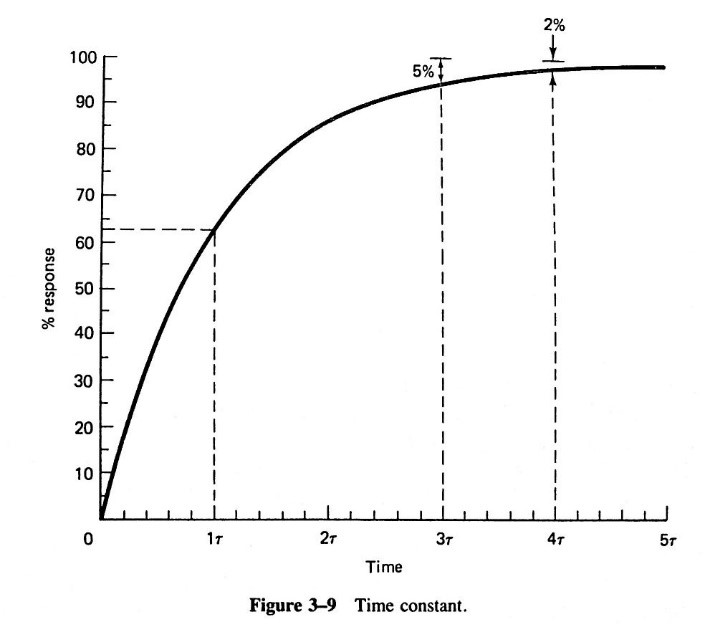
2. ثابت زمانی (Time Constant)
ثابت زمانی اساساً برای مبدل های مرتبه اول کاربرد دارد و آن مدت زمانی است كه خروجی به 2/63% مقدار نهایی خود میرسد.
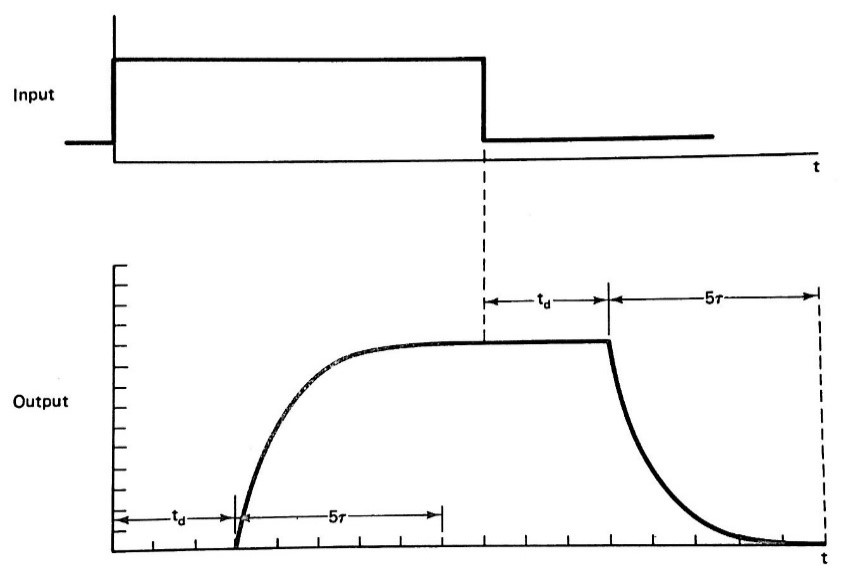
بعد از گذشت 3 ثابت زمانی تا حد 95% مقدار نهایی خواهد رسید، بعد از گذشت 4 ثابت زمانی تا حد 98% مقدار نهایی و بعد از گذشت 5 ثابت زمانی تا حد 9/99% مقدار نهایی می رسد که در این حالت می توان پاسخ را كامل شده فرض کرد، چون پس از این مدت زمان، به مقدار نهایی خود میرسد.
3. زمان مرده (Dead Time)
مدت زمانی است كه بعد از اعمال ورودی پله، زمان لازم است تا خروجی شروع به تغییر كند.
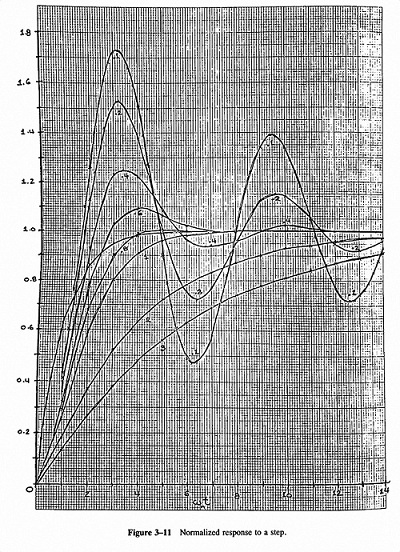
4. ضریب میرایی (Damping Coefficient) و فركانس رزونانس (Resonant frequency)
برای مبدل های مرتبه دوم، ضریب میرایی ξ و فركانس رزونانس ωn از پارامترهای مهم ویژگی دینامیكی محسوب می شود. برای مقادیر مختلف ضریب میرایی بزرگ تر، مساوی یا کوچک تر از یک، خروجی مبدل، رفتارهای گوناگونی از خود نشان می دهد:
- فرا میرایی (Over Damped) به ازای مقادیر 1<ξ
- میرایی بحرانی (Critically Damped) به ازای مقادیر 1=ξ
- فرومیرایی (Under Damped) به ازای مقادیر 1<ξ
5. درصد بالازدگی (Overshoot Percentage)
بالازدگی (Overshoot) در مبدل های فرومیرا (Under Damped) رخ می دهد. درصد بالازدگی، مقدار اولین ماکزیمم، نسبت به مقدار نهایی است.

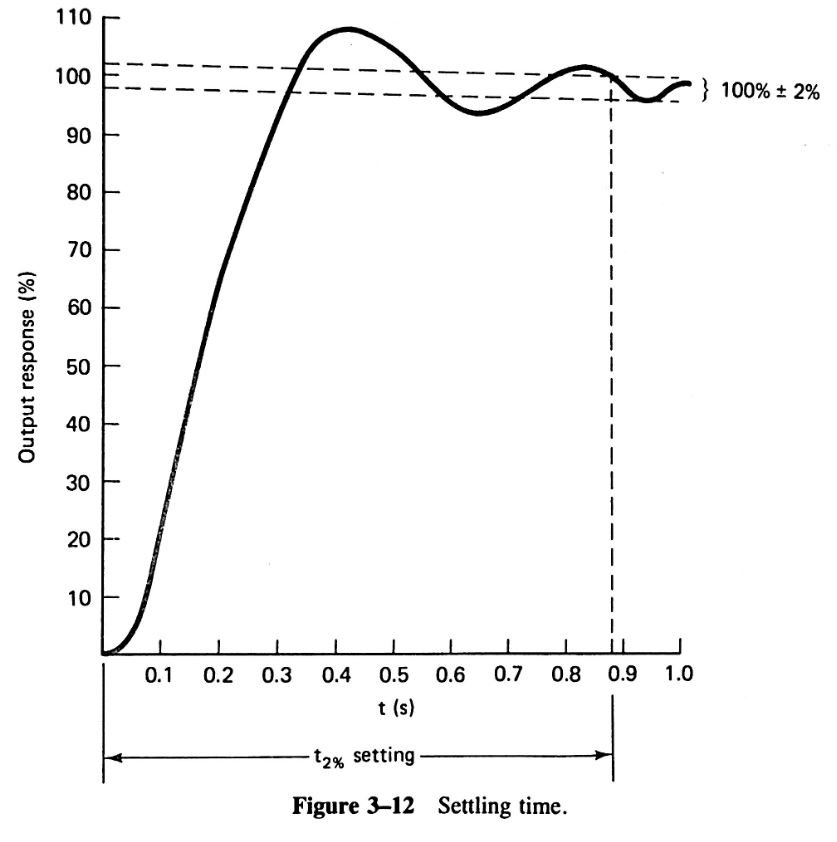
6. زمان نشست (Settling Time)
این زمان مشخص میكند كه بعد از چه مدت زمانی، تغییرات خروجی مبدل در محدوده باند 2% یا 5% مقدار نهایی می رسد.
تعیین ویژگی های دینامیکی مبدل با استفاده از ورودی سینوسی
با استفاده از ورودی سینوسی می توان پاسخ فركانس و رفتار مبدل را در فركانس های مختلف به دست آورده، هم چنین، فركانس قطع بالا را مشخص نمود. “منحنیهای پاسخ فركانسی” و “فركانس قطع بالا”، ویژگیهایی هستند كه پاسخ مبدل را به یك ورودی موج سینوسی تبدیل می کنند.
برای یك مبدل تقریباً خطی، خروجی نیز سینوسی است. وقتی كه فركانس ورودی افزایش می یابد، انتظار این است كه مبدل نیز به همان سرعت به ورودی پاسخ دهد، اما به فركانسی خواهد رسید كه دیگر نمی تواند با همان سرعت اولیه به ورودی پاسخ دهد. در نتیجه دامنه خروجی با افزایش فركانس، كوچك تر می شود. منحنی پاسخ فرکانسی در واقع ترسیم بهره مبدل (نسبت خروجی به ورودی) نسبت به تغییر فرکانس می باشد. گرچه عموماً مقدار بهره به صورت دسیبل و به فرم زیر محاسبه می شود:
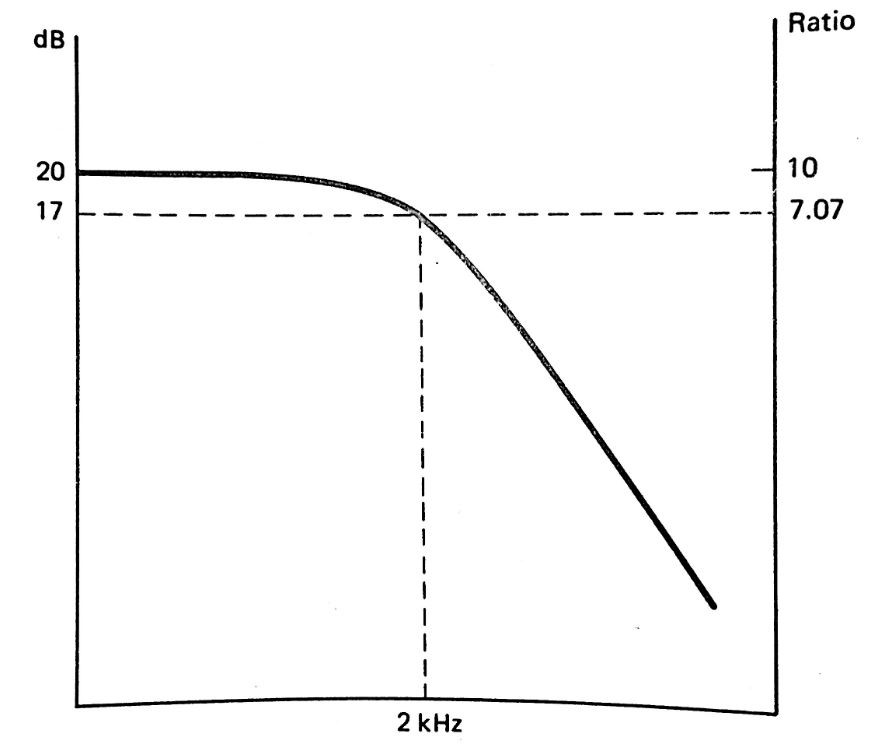
محور افقی نیز باید لگاریتمی باشد و نه خطی. كه اجاز بدهد بازه فركانسی بیش تری رسم گردد. فركانس قطع بالا (fh) فركانسی است كه بهره مبدل به رقم 0.707 می رسد. اگر محور عمودی بر واحد دسیبل باشد، (fh) در 3dB- اتفاق میافتد.
به عنوان مثال، فركانس قطع بالای مبدلی كه پاسخ فركانسی آن در شكل زیر رسم شده است 2 كیلو هرتز می باشد:
لازم به ذکر است که گاهی اوقات نمی توان ورودی سینوسی بر یك سیستم یا مبدل اعمال نمود و باید فركانس قطع بالا را با روش دیگری محاسبه کرد. فركانس قطع بالا و زمان صعود، توسط رابطه زیر به یكدیگر تبدیل می شوند (و بالعكس):
وقتی كه اندازه گیری مشخصه گذرای یك سنسور، دشوار باشد با استفاده از فركانس قطع بالا كه به طور معمول، توسط كارخانه سازنده اعلام می شود، می توان سرعت پاسخ سنسور را نیز با استفاده از این رابطه به دست آورد.
سخن پایانی
در این مقاله سعی کردیم ویژگیهای دینامیکی مبدل ها نسبت به ورودی پله و ورودی سینوسی مانند ثابت زمانی، ضریب میرایی، فرکانس رزونانس و … را با ارائه تصاویری خدمتتان شرح دهیم در مقاله قبلی ویژگی های استاتیکی میدل و سنسورها تحت عنوان ویژگی های تجهیزات اندازه گیری شرح داده شده است. این مقاله بر گرفته از کتاب Industrial Control Electronics نوشته مایکل جاکوب است با مراجعه به بخش اصول و مبانی ابزار دقیق در مقالات سایت می توانید مقالات بیشتری را با محوریت این کتاب مطالعه نمایید.

4 پاسخ
سلام
چگونه میتونیم پاسخ فرکانسی مبدل رو ارزیابی کنیم و چه تاثیری بر عملکرد کلی سیستم دارد و اینکه تغییرات دما میتواند ویژگی های دینامیکی مبدل را تحت تاثیر قرار دهد؟
ویژگی های دینامیکی مبدل، دیستورت هم هست؟
سلام، بله، دیستورت (اعوجاج) هم یکی از ویژگیهای دینامیکی مهم مبدلهاست.
در یک پروژه ابزار دقیق؛ چگونه میتوان ویژگی های دینامیکی مبدل را به طور دقیق اندازه گیری کرد؟