پتانسیومتر، یکی از متداولترین انواع ترانسدیوسر یا مبدل موقعیت است. روش هاي گوناگونی براي اندازه گيري موقعيت وجود دارد. بصورت کلی چهار نوع مبدل موقعیت به شرح زیر است:
- پتانسيومتر
- ترانسفورماتور تفاضلی متغیر خطیLVDT و ترانسفورماتور تفاضلی متغير چرخشی RVDT
- انکودر افزایشی و مطلق نوری
- سینکرو (Synchro) و ریزولور (Resolver)
در این مقاله پتانسيومتر (Potentiometer) به عنوان اولین مبدل موقعیت توضیح داده میشود با ما همراه باشید. در صورتی که میخواهید بدانید ترانسدیوسر چیست مقاله ترانسدیوسر چیست، کاربرد و انواع آن را بخوانید.
پتانسیومتر چیست؟
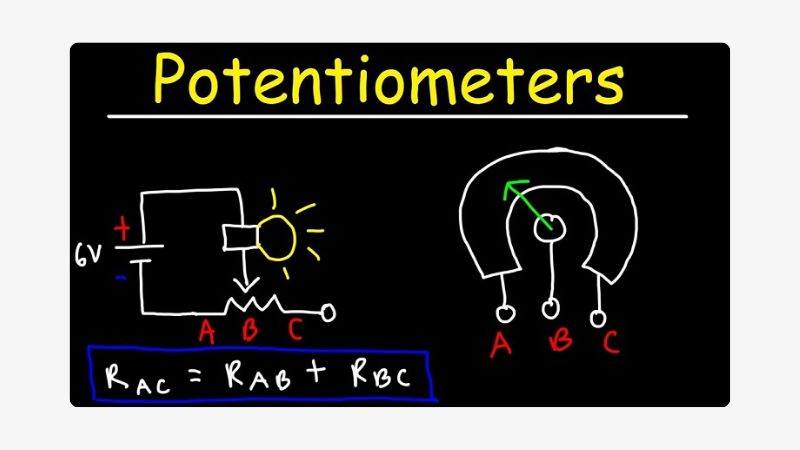
پتانسيومتر (Potentiometer) که به آن ولوم نیز گفته میشود، نوعی مقاومت متغیر است که برای کنترل ولتاژ، جریان یا سیگنال در مدارهای الکتریکی به کار میرود. پتانسیومتر را بیشتر به عنوان تقسیم کننده ولتاژ میشناسند. پتانسیومتر دارای سه ترمینال یا پایه به نام های A,B و W میباشد. دو پایانه A و B به دو سر المان مقاومت متصل هستند (دارای ولتاژ مثبت و منفی) و پایانه W بین دو پایانه دیگر قرار دارد و به وایپر متصل است. بر روی پتانسیومتر پیچی قرار گرفته که با چرخاندن آن وایپر حرکت میکند و مقدار مقاومت بین ترمینالهای A و W را تغییر میدهد. این تغییر مقاومت، ولتاژ خروجی از پتانسیومتر را تغییر میدهد.
پتانسيومتر (Potentiometer) كه جهت اندازه گيري و جا به جايي مورد استفاده قرار مي گيرند، بسیار شبيه به پتانسيومترهايي هستند كه در مدارات الكتريكي و الكترونيكي و جهت تنظيم مقاومت مورد نياز به كار برده می شوند. اما باید اشاره کرد كه سازندگان اين نوع پتانسيومترها دقت و تلاش بيش تری برای ساخت اين نوع مبدل ها به كار می برند.
انواع پتانسیومتر
پتانسیومترها در اشکال و اندازههای مختلف و با مقادیر مقاومت و کاربردهای متنوع موجود هستند. برخی از رایجترین انواع پتانسیومترها عبارتند از:
- پتانسیومتر خطی (Linear Potentiometer)
- پتانسیومتر تک دور و چند دور (single-turn and multi-turn potentiometer)
- پتانسیومتر لگاریتمی(Logarithmic Potentiometer)
- پتانسیومتر تریمر
در ادامه سعی داریم پتانسیومترهای خطی و پتانسیومتر های تک دور و چند دور را توضیح دهیم. در شکل زیر شمای کلی از این دو متانسیومتر نشان داده میشود. تصاویر a و b مربوط به پتانسیومتر خطی و تصاویر c و d مربوط به پتانسیومتر چند دور و تک دور میباشد.

چنان چه در تصاویر بالا می بینید، اندازه گيری يك دور كامل و يا كمانی از يك دايره کاملا امکان پذیر است.
پتانسیومتر خطی
در پتانسيومترهای خطیlinear potentiometer، وایپر در امتداد یک مسیر خطی حرکت میکند و مقاومت به طور خطی با حرکت وایپر تغییر میکند. از پتانسیومتر خطی براي اندازه گيری جا به جايی در راستاي يك خط مستقيم استفاده میشود. در ادامه برخی از مزایا و معایب پتانسیومتر خطی را بیان میکنیم:
ساده و مقرون به صرفه: ساخت آنها در مقایسه با پتانسیومترهای چند دور پیچیدگی کمتری دارند از این رو گزینه مقرون به صرفه تری میباشند.
کاربردهای متداول: برای طیف وسیعی از کاربردها که در آن به یک سطح اولیه از تنظیم مقاومت موردنیاز است، مناسب هستند، مانند کنترل صدا در رادیو، کنترل روشنایی در نمایشگر، یا کنترل جوی استیک در گیم پد.
کنترل محدود: در مقایسه با پتانسیومترهای چند دور ، محدوده تنظیم محدودتری را ارائه می دهند
پتانسیومتر تک دور و چند دور (پتانسیومتر چرخشی)
پتانسیومتر تک دور single-turn potentiometer یک مقاومت متغیر است که تنظیم مقاومت آن را با چرخاندن شفت فراهم میشود. پتانسيومتر تك دور می تواند تا 357 درجه را اندازه گیری کند. این در حالی است که پتانسیومتر چند دور multi-turn potentiometer به عنوان مثال با 10 دور ميتوانند تا 3500 درجه را نيز اندازه گيري كنند. لازم به ذکر است که پتانسیومترهای تک دور و چند دور براي اندازه گيری جا به جایي های چرخشی به كار مي روند.
یک پتانسيومتر ممكن است به صورت سيم پيچ باشد كه در اين صورت از يك سيم بسیار نازك (0.01 ميلي ميتر) و از جنس فلز پلاتينيوم يا آلياژ نيكل بوده كه با دقتی بسيار زياد، پيچيده شده است. درست زمانی كه قسمت لغزان بر روي سيم پيچ حركت کرده و از يك قسمت به قسمت ديگري می رود؛ مقاومت پتانسيومتر تغيير مي كند. كوچك ترين تغيير يا جا به جايي در موقعيت، كه مي تواند اندازه گيري شود (حد تفكيك)؛ زمانی رخ می دهد كه بخش لغزان، از يك دور به دور ديگر حركت كند. حد تفكيك از رابطه زير قابل محاسبه مي باشد:

اگر شكل بدنه سيم پيچ با روشی صحیح و دقیق شكل داده شده باشد، رابطه ای خطي بين وضعيت قسمت لغزنده و ولتاژ خروجي برقرار خواهد بود. اما تغيير شكل بدنه موجب رابطه ای غير خطي و دلخواه خواهد شد. شكل زير، اين موضوع را به خوبی نشان مي دهد:

توابع استاندارد بسيار زيادی با روابط تبديل وضعيت به ولتاژ دلخواه در بازار موجود است.اين روابط غير خطی ممكن است براي جبران و يا كنترل يك عامل غيرخطي در يك سيستم كنترلی و بدون نياز به انجام محاسبات رياضی برقرار باشند و گاهی حتی بدون نياز به كامپيوتر و يا مدارات آنالوگ كامپيوتر به كار گرفته شود.
توابع استاندارد، در شكل زير نشان داده شده است. شكل های ارائه شده به اين معنا است كه اگر پتانسيومتر به طور پيوسته از ابتدا تا انتها حركت كند، چنين ولتاژهايی توليد می كند:

پتانسيومترهای پیوسته یا همان پتانسیومتر چند دور، بدنه ای از جنس فيلم كربنی يا فلزی، پلاستيك های هدايتی و يا از سراميك های فلزی دارند. اين نوع پتانسیومترها مزیت های زیادی نسبت به پتانسيومترهای سيم پيچ دارند:
- قدرت تفكيك آن ها بيش تر است چون محدوديتي مربوط به تعداد دور سيم پيچ ها ندارند.
- قسمت متحرك برروي يك سطح صاف حركت مي كند و پرش وجود ندارد و ميزان خرابي كم تر می شود.
- سرعت ماکزيمم يك پتانسيومتر سيم پيچ در حدود 300 دور بر دقيقه مي باشد. در حالي كه يك پتانسيومتر پيوسته مي تواند تا سرعت 2000 دور بر دقيقه نيز مورد استفاده قرار بگيرد.
خدمات نیکسا: مشاوره، نصب و راه اندازی تجهیزات ابزار دقیق و اتوماسیون صنعتی نیکسا
ویژگی های الكتريكی پتانسیومتر
برخی از ویژگی هاي الكتريكي مرتبط با پتانسيومترها که برای شناخت، تشخیص و تفکیک ضروری است، عبارت اند از:
- حد يا قدرت تفكيك
- خطي بودن
- حركت بيش از حد الكتريكي (Electrical Overtravel)
- شكل ترمينال
- تلرانس مقاومت
- موقعيت سر وسط
- ميزان توان و حرارت قابل تحمل
- نويز
- گشتاور شروع و در حال گردش
- اينرسي
- ویژگی هاي AC

در بخش های قبل، ویژگی های حد تفکیک و خطی بودن مبدل ها مورد بررسی قرار گرفت. در این بخش به بررسی ویژگی های نویز و حرکت الکتریکی بیش از حد می پردازیم.
نویز (Noise)
نویز در پتانسيومتر مي تواند ناشی از جنس آن باشد. عامل اصلی ايجاد نويز، حرارت يا جريان عبوری از پتانسيومتر است. به همين دليل می بايست ولتاژ تغذيه آن را تا حد ممكن پايين نگه داشت. نويز هم چنین می تواند در اثر پرش های قسمت لغزان ایجاد شود. پتانسیومترهای پیوسته یا پتانسیومترهای چند دور می توانند بسیار سریع تر حرکت کرده و نویز کم تری نسبت به انواع سیم پیچ دار خود، به وجود بیاورند.
پتانسیومترهای نوع سيم پيچ دار نيز خاصيت سلفی و خازنی سری با مقاومت از خود نشان می دهند. راكتانس ناشی از اين عوامل در فركانس 50هرتز، حدود مگا اهم مي باشد. اما اگر پتانسیومتر با يك سيگنال سينوسی 10كيلو هرتزی تغذيه شود اين راكتانس تا حد كيلو اهم كاهش پيدا می كند. در موقع استفاده از سيگنال متناوب می بايستی هم فركانس و هم مقدار مقاومت پتانسيومتر، در حد امكان پايين انتخاب شوند.
حركت الكتريكی بیش از حد
به اين واقعيت اشاره دارد كه ترمينال ممكن است دقيقاً در قسمت انتهايي خود نباشد. به این معنا که وقتي قسمت لغزان به ترمينال مي رسد شفت ممكن است بيش تر بچرخد اما ولتاژ خروجي تغييري نكند.به عبارت ساده تر، زمانی است که دستگیره یا شفت پتانسیومتر را بیشتر از چیزی که برای حرکت الکتریکی طراحی شده است بچرخانید.
چندين روش جهت اتصال يك پتانسيومتر به يك سيستم كنترلی وجود دارد. ساده ترين روش، اين است كه آن را با ولتاژ تغذيه در يك سر و اتصال زمين در سر ديگر تغذيه نمود. در اين روش وقتي قسمت لغزان به قسمت انتهايی مي رسد ولتاژ خروجي صفر خواهد شد و بر عكس وقتی قسمت لغزان به بالاترين قسمت پتانسيومتر می رسد، ولتاژ تغذيه خارج خواهد شد (شکل زیر قسمت a). اگر قسمت لغزان به صورت کامل، تا قسمت انتهايي حركت نكند به کارگیری پتانسیومتر به فرم شکل زیر و قسمت b مناسب خواهد بود.

تنظيم صفر اين قابليت را ایجاد می کند تا ولتاژ صفر در هر موقعيت دلخواه تنظيم شود. با همين روش، نيز مي توان ولتاژ رنج نهايي يا بالا را نيز تنظيم نمود. باید توجه داشت كه براي تنظيم اين دو حد بالا و پايين، چندين دور متوالي، نياز به تنظيم دقيق می باشد. چون اين دو تنظيم بر روی يكديگر اثر می گذارند.
با اعمال تغذيه دوبل به يك پتانسيومتر می توان ولتاژ صفر خروجی را در وسط پتانسیومتر تنظیم کرد. اين روش را در قسمت c شكل فوق مشاهده می کنید. البته كامل ترین نوع اين روش، در قسمت d نمايش داده شده است. در اين روش، سيگنالی خطا نسبت به زمين براي استفاده كنترل كننده نيز فراهم شده است.
متغير پروسه مورد كنترل، توسط پارامتر مورد اندازه گيري، تحريك شده و خطا به شكل زير تعريف مي گردد:
Error = SP – PV
اگر نقطه مرجع و متغير مورد كنترل هر دو در يك وضعيت قرار بگيرند، خطايي وجود نخواهد داشت و ولتاژ خروجی صفر مي شود. اگر قسمت لغزان در نقطه مرجع به سمت بالا حركت كند، مقاومت آن افزايش پيدا کرده و موجب مي شود ولتاژ خروجی مثبت گردد.
بنابراين پروسه می بايستي با حركت خود، پاسخ مناسب دهد و به همان اندازه به سمت بالا حركت كند تا ولتاژ خروجی صفر گردد.
مقاومت RL به اين روش اضافه شده تا لحظه ای که نقطه مرجع تا پايين ترين قسمت خود حركت کرده و ميزان جريان عبوری را محدود نمايد.
تمامی بحث تا اين جا با فرض اين است كه هيچ گونه باری وجود ندارد. اما در حقيقت هر مبدل موقعيت پتانسيومتری، به يك بار متصل مي گردد که مي تواند باعث غير خطي شدن مبدل گردد. به شكل زير نگاه كنيد:

ولتاژ خروجی مطلوب عبارت است از:

در حالي كه RL موازی با R1 بوده و بايد اثر آن در نظر گرفته شود. در واقع ولتاژ خروجی واقعی عبارت است از:

با ساده نمودن خواهيم داشت:

با استفاده از يك كامپيوتر مي توان براي مقادير مختلف R1 و R2 معادله فوق را حل نمود و بدترين حالت را به عنوان بدترين حالت غير خطي نقطه پاياني در نظر گرفت و همين كار را براي مقادير مختلف RL نيز انجام داد. نتيجه چنين عملياتي در جدول زير نشان داده شده است:

نحوه نصب پتانسیومتر
پتانسیومتر یک مقاومت متغیر است که دارای سه پایه است. برای نصب پتانسیومتر، دو پایه کناری آن به دو سر منبع ولتاژ یا قسمتی از مدار که میخواهید ولتاژ یا جریان آن را کنترل کنید، متصل میشوند. پایه وسط پتانسیومتر، پایه متغیر است و به قسمتی از مدار که میخواهید ولتاژ یا جریان متغیر را به آن اعمال کنید، متصل میشود. با چرخاندن محور پتانسیومتر، مقدار مقاومت بین پایه وسط و هر یک از پایههای کناری تغییر میکند و در نتیجه ولتاژ یا جریان خروجی نیز تغییر میکند.
در ویدئو زیر نحوه نصب پتانسیومتر آموزش داده میشود:
تفاوت ولوم و پتانسیومتر
پتانسیومتر و ولوم، دو قطعه الکترونیکی هستند که برای تنظیم ولتاژ، جریان یا مقاومت در مدارهای الکتریکی استفاده میشوند، اما با وجود شباهتها، تفاوتهای کلیدی در کاربرد و ساختار دارند.
پتانسیومتر، یک مقاومت متغیر سه پایه است که با تغییر موقعیت لغزنده یا شفت، مقاومت الکتریکی بین دو پایه را تغییر میدهد. این قطعه برای تنظیم دقیق ولتاژ یا جریان در مدارهای الکترونیکی، کالیبراسیون دستگاهها و کنترل تدریجی پارامترهایی مانند نور، صدا یا سرعت موتورها کاربرد دارد.
ولوم، در واقع نوعی پتانسیومتر است که به طور خاص برای تنظیم حجم صدا در دستگاههای صوتی مانند رادیو، تلویزیون و اسپیکرها طراحی شده است. تفاوت اصلی ولوم با پتانسیومتر در طراحی و کاربرد آن است؛ ولومها معمولاً دارای دستهای چرخشی برای تنظیم آسان توسط کاربر هستند و ممکن است از نوع خطی یا لگاریتمی باشند تا با حساسیت گوش انسان مطابقت داشته باشند. به عبارت دیگر، هر ولوم یک پتانسیومتر است، اما هر پتانسیومتری لزوماً ولوم نیست.

سخن پایانی
در این مقاله به معرفیک یکی از انواع مبدل های موقعیت به نام پتانسیومتر پرداختیم فرمولهای محاسبه ولتاژهای خروجی پتانسیومتر را بیان کردیم و سعی کردیم پتانسیومترهای خطی و پتانسیومتر دوار را در قالب تصویر بیان کنیم. لازم به ذکر است که این مقاله بخشی از کتاب Industrial Control Electronics نوشته مایکل جاکوب است با مراجعه به بخش اصول و مبانی ابزار دقیق در مقالات سایت می توانید مقالات بیشتری را با محوریت این کتاب مطالعه نمایید.

3 پاسخ
سلام مهندس، چطوری میشه از پتانسیومتر خطی برای ورودی تنظیم سرعت الکتروموتور DC استفاده کرد؟
سلام، استفاده از پتانسیومتر خطی برای کنترل سرعت موتور DC یک روش بسیار رایج و ساده است. با تغییر موقعیت لغزنده پتانسیومتر، مقاومت متغیری در مدار ایجاد میشود که این تغییر مقاومت منجر به تغییر ولتاژی میشود که به موتور اعمال میشود. در نتیجه، سرعت موتور متناسب با این ولتاژ تغییر میکند.
سلام روز خوش
مهنس جان لطفا راهنمایی میکنید
چگونه یک پتانسیومتر را به عنوان یک مقسم ولتاژ در مدار ببندیم؟